This page contains information about Model Submarine Dive Systems as well as a few of my Favorite Links. Feel free to look around. Let me know if you see anything that needs changing, or if you have any ideas for anything that you'd like to see here!
FAVORITE LINKS - click here
Perhaps the simplest form of diving technology is the dynamic diver. This model submarine has no functional
ballast system at all, but rather uses its dive planes to “push” it under the surface of the water.
In order to dive, the model must be moving forwards at a respectable pace, enough that the pressure exerted by the
dive planes are sufficient to overcome the buoyancy of the model itself.
These models usually feature rather large dive plane surfaces, and are also normally ballasted (weighted) very low in
the water so that their reserve buoyancy is as low as possible, the planes can be as small as possible, and the
resulting necessary forward speed to dive is as slow as possible.
| Pros: |
Very simple Always positively buoyant and will return to surface if model loses power. |
| Cons: |
Must be ballasted very low Large planes usually necessary Model must be moving very quickly in order to dive |
One of the more popular ballast systems employed in North American model submarines is the Gas Ballast System.
In this system, liquefied gas is stored on board the model in a pressure vessel, and is expelled into the ballast
tank in order to displace water and bring the model to the surface. Operation is typically achieved through
the use of a single servo. In one direction, the servo operates a vent located at the top of the ballast tank,
releasing air and allowing water to enter. In the other direction, a Schraeder (standard tire) valve is depressed
in the pressure vessel, releasing the liquid air into the ballast system and displacing the water.
Care must be employed when filling the pressure vessel, as the liquid air is extremely cold when it reverts to a gas,
and frostbite can easily occur if flesh is exposed to it. This system also has a propensity to “freeze”
up if too much air is released at one time.
Operators of these boats quickly learn to count their blow/vent cycles in order not to run out of air in the pressure
vessel. If care is not employed, the model will run out of air and will not be able to surface again. Most model
submarines can achieve between 8 and 12 cycles before requiring refueling with liquid air.
| Pros: |
Fairly simple to implement Very realistic release of air and bubbles when underwater |
| Cons: |
A source of liquid air must be kept on hand The model must be refueled with liquid air regularly Easy to miscount cycles and be unable to surface |
One of the most popular ballast systems in Europe is the Piston Tank Ballast System, made most famous by the
German submarine kit manufacturer Alexander Engel. These systems can be quite simple (basically a large plunger
moving in a sleeve driven by a motor), or very complicated with multiple tanks and computerized control.
The more complicated systems will include multiple (typically two) piston tanks located forward and aft. This
allows control of pitch by making one tank slightly more or less full than the other. Complete dive systems
such as Engel’s TMAX system allow for very precise control of buoyancy, to the point where the model can
hover autonomously at a prescribed depth through the use of pressure sensors.
With these systems, air is evacuated from the tank and is forced into the surrounding enclosure for the ballast
tank. These are most commonly used on “dry hull” submarines, or submarines with a large volume of
dry area within. As the tank is filled, the air is forced into the dry area, increasing the air pressure there.
Care must be made when designing these systems so that seals and access hatches are able to withstand the
pressures not only pushing inwards by water, but pushing outwards by internal air pressure.
When utilizing a single tank, the trim of the submarine will be affected during the fill and empty cycles as
the center of gravity of the model shifts as water is taken in.
These systems are quite robust and require little maintenance.
| Pros: |
Very flexible Amazing levels of control |
| Cons: |
Takes some time to work from full to empty or back again. Very complicated when they incorporate circuit boards and computer control requires a large volume of dry area to vent into Takes up a lot of room to allow for the main drive shaft to extend and retract |

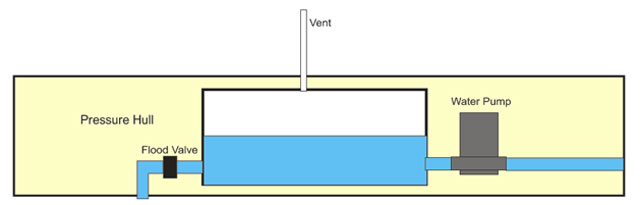
The Vented Tank Model is not a truly static diving boat, but is rather a very close approximation.
In this system, the flood valve is opened and air leaves the ballast tank through the vent, which typically
exits very high on the model, hidden as a periscope or mast. Water enters the ballast tank from the flood
valve until the model is fully vented, at which time it will be sitting at “decks awash” or
slightly positively buoyant. With the reduced buoyancy, the boat’s dive planes can now be used to
pull the boat downwards and under the water with little effort and lower speeds.
To surface, the flood valve is closed and the positive buoyancy of the model brings the boat back up to
the “decks awash” state. A small pump then pumps water out of the ballast tank, drawing in
air from the surface through the vent mast.
Many times this system will be used in conjunction with another system that will allow the model to be
taken to neutral or slightly negative buoyancy.
| Pros: |
Simple system, very reliable Slight positive buoyancy of the model is very safe |
| Cons: |
The boat must have the vent above the water’s surface in order to empty ballast tanks Cannot statically dive |
The simple operation and elimination of the need for liquid air onboard makes it a good choice for a ballast
system.
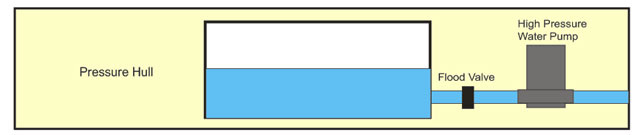
In this system, the air in the ballast tank begins at an ambient pressure. The valve is then opened and water
is pumped into the ballast tank, compressing the air, reducing its volume and making the model heavier. When
the pump can no longer pump any more water into the tank, or when the desired buoyancy is achieved, the valve
is shut and the pump turned off. Assuming a good pump is found, a modeler can expect to be able to utilize
approximately 70 to 80% of the volume of their ballast tank.
To surface, the valve is simply opened and the resulting avenue of escape for the pressurized air forces water
through the pump mechanism and out of the model, allowing the air to expand and causing the model to become
positively buoyant once again.
| Pros: |
Simple system, very reliable If a leak develops in the valve system, the model will inherently blow the ballast, causing the model to surface. |
| Cons: | The ballast tank can only utilize approximately 70 to 80% of its total volume, resulting in wasted space |
The rather complex nature of the Compressed Air System and the need for a large volume to mount the internal
mechanisms makes this system more uncommon than others.
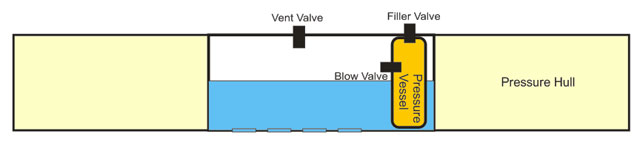
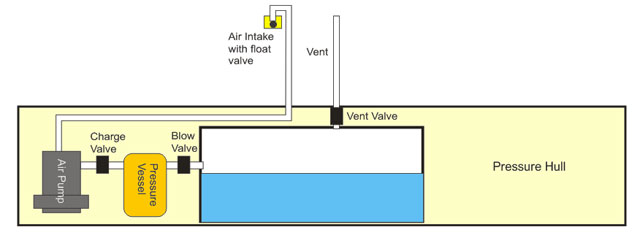
In this setup, the main ballast tank has one outlet and one inlet. To dive, the vent valve is opened, and water
enters the ballast tank through openings in the bottom.
To surface, the blow valve is opened, and compressed air enters the ballast tank from the storage vessel.
Typically, the compressed air system has only enough compressed air for a maximum of three cycles due to
limitations on storage vessel size and the maximum pressure obtainable by the compressor. The number of cyclers
can be as low as one, depending on the ballast tank size and the size of the storage vessel. The system needs
to be “recharged” between cycles when surfaced.
To recharge the system, the storage vessel charging valve is opened and the compressor is turned on. Air is
pulled from the surface through a float valve in the conning tower or periscope that prevents water ingress,
otherwise water would get into the compressor. The compressor charges the storage vessel until the desired
pressure is reached, and is turned off through the use of a pressure sensor which also trips the closing of
the charging valve.
These systems are typically very noisy when charging.
| Pros: | Most like the real thing |
| Cons: |
The system is tricky to implement Loud to charge Bulky system Compressor susceptible to pulling in water |
The RCABS systems are becoming more and more popular in the North American modeling crowd due to the fact
that they durable, and require no outside source of air to operate.
There are two versions of this system. In the true RCABS version, the model begins on the surface with a
partial vacuum in the WTC and the ballast bladder inflated. Diving is accomplished by opening the valve
that leads to the water tight cylinder’s interior. The vacuum in the WTC pulls air out of the ballast
bladder, deflating it and causing the boat to dive. To surface, the valve is closed and the air pump forces
air into the bladder, causing a partial vacuum once again inside the WTC.
With this system, a loss of battery power means that it will not be possible to surface the boat.
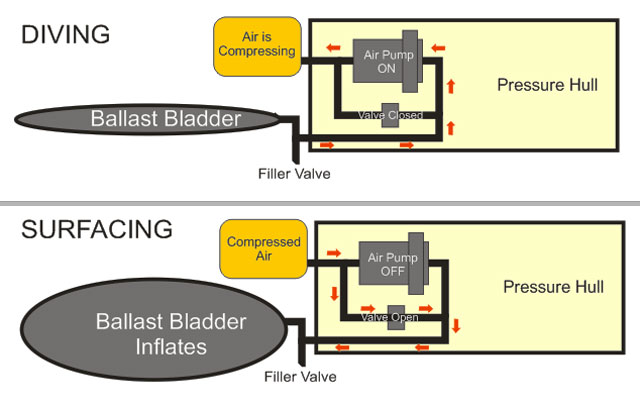
The other version is called RCABS-R. In this system, the air in the WTC always remains at
ambient air pressure. The boat begins on the surface with the bladder inflated and the compressed air storage
vessel at ambient pressure. To dive, the blow valve is closed and the air pump pulls air from the ballast
bladder and pushes it into the compressed air storage vessel. Once the bladder is deflated, the pump is shut off.
The advantage to this system is that if there is a loss of power, or a low battery condition, the boat will not
want to dive. Also, if there is a leak in the valving, air will return to the ballast bladder and the boat will
surface. With this system, a filler valve must also be fitted in order to get the bladder inflated once the system
is closed off.
Both systems require one-way valves at the pumps to stop air from being forced through the pump.
| Pros: |
Sealed system No need for liquid gas RCABS-R has built in failsafe |
| Cons: |
More complicated Loud to charge |
The following links mostly pertain to either RC submarines, or the Nautilus herself. My favorite links are always being updated... please keep checking back here for updates.
Do you know of a great RC Submarine site?
Let me know and I'll be happy to add it to My Favorite Links!
RC Submarine Related
Russian Typhoon Submarines
Nautilus Submarine
Miscellaneous
RC Submarine Forums
